Expressions
A guide for the defining and understanding the variable expressions used in InfiniteOpt. See the technical manual for more details.
Nonlinear modeling is now handled in InfiniteOpt via JuMP's new nonlinear interface. See Nonlinear Expressions for more information.
Overview
Expressions in InfiniteOpt (also called functions) refer to mathematical statements involving variables and numbers. Thus, these comprise the mathematical expressions used that are used in measures, objectives, and constraints. Programmatically, InfiniteOpt simply extends JuMP expression types and methods.
Parameter Functions
Rather than construct an explicit symbolic expression, we might want to provide a more complex function of infinite parameter(s) (e.g., nonlinear setpoint tracking). Thus, we provide parameter function objects that wrap arbitrary Julia functions that take infinite parameters as input and output a scalar value. Mathematically, these can can be interpreted infinite variables constrained to a particular known function. These are created via @parameter_function or parameter_function and is exemplified below by defining a parameter function f(t) that uses sin(t):
julia> using InfiniteOpt;
julia> model = InfiniteModel();
julia> @infinite_parameter(model, t in [0, 10]);
julia> @parameter_function(model, f == sin(t))
f(t)Here, we created a parameter function object, added it to model, and then created a Julia variable f that serves as a GeneralVariableRef that points to it. From here we can treat f as a normal infinite variable and use it with measures, and constraints. For example, we can do the following:
julia> @variable(model, y, Infinite(t));
julia> f(0)
f(0)
julia> meas = integral(y - f, t)
∫{t ∈ [0, 10]}[y(t) - f(t)]
julia> @constraint(model, y - f <= 0)
y(t) - f(t) ≤ 0, ∀ t ∈ [0, 10]We can also define parameter functions that depend on multiple infinite parameters and even use an anonymous Julia function if desired:
julia> @infinite_parameter(model, x[1:2] in [-1, 1]);
julia> @parameter_function(model, myname == (t, x) -> t + sum(x))
myname(t, x)In many applications, we may also desire to define an array of parameter functions that each use a different realization of some parent function by varying some additional positional/keyword arguments. We readily support this behavior since parameter functions can be defined with additional known arguments:
julia> @parameter_function(model, pfunc_alt[i = 1:3] == t -> mysin(t, as[i], b = 0))
3-element Vector{GeneralVariableRef}:
pfunc_alt[1](t)
pfunc_alt[2](t)
pfunc_alt[3](t)The use of parameter_function is convenient for enabling do-block syntax which often handy. For instance, when defining a time-varied setpoint for optimal control:
julia> setpoint = parameter_function(t, name = "setpoint") do t_supp
if t_supp <= 5
return 2.0
else
return 10.2
end
end
setpoint(t)Please consult the following links for more information about defining parameter functions: @parameter_function and parameter_function.
We can also update the underlying function as often required for repeated solves. This is accomplished via set_parameter_value:
julia> set_parameter_value(setpoint, t -> 5)
Beyond this, there are a number of query and modification methods that can be employed for parameter functions and these are detailed in the technical manual.
Variable Hierarchy
Expressions employ variable reference types inherited from JuMP.AbstractVariableRef to form expression objects. InfiniteOpt uses a hierarchy of such types to organize the complexities associated with modeling infinite dimensional programs. The figure below summarizes this hierarchy of variable reference types where the abstract types are depicted in green and the concrete types are shown blue.
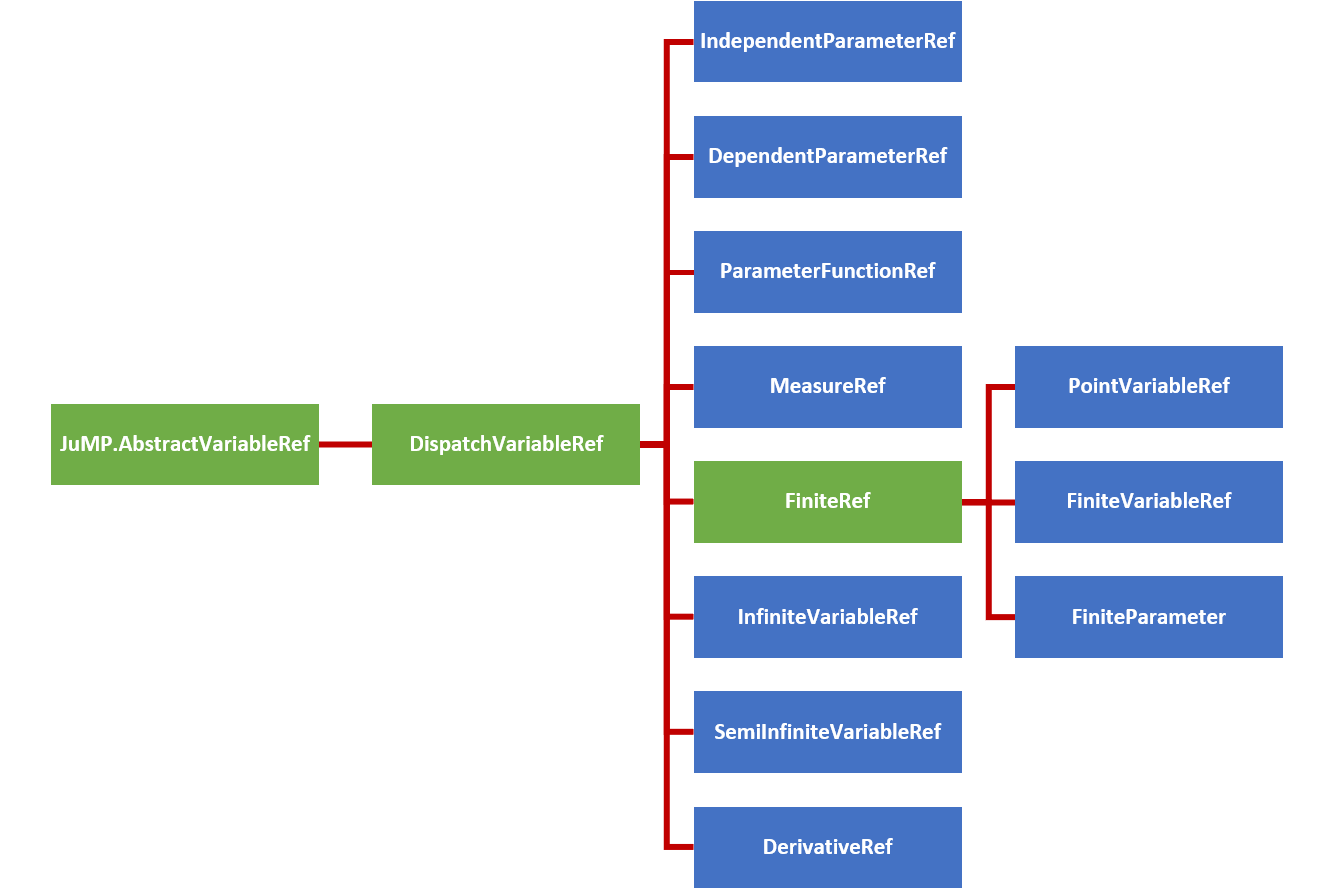
In consistently with JuMP expression support, GeneralVariableRef exists as a variable reference type that is able to represent any of the above concrete subtypes of DispatchVariableRef. This allows the expression containers to be homogeneous in variable type which provides improved performance.
However, the variable hierarchy is used for variable methods. To accomplish this, appropriate GeneralVariableRef dispatch methods are implemented (which are detailed in User Methods section at the bottom of this page) that utilize dispatch_variable_ref to create the appropriate concrete subtype of DispatchVariableRef and call the appropriate underlying method. These dispatch methods have been implemented for all public methods and the underlying methods are what are documented in the method manuals throughout the User Guide pages.
Affine Expressions
An affine expression pertains to a mathematical function of the form:
\[f_a(x) = a_1x_1 + ... + a_nx_n + b\]
where $x \in \mathbb{R}^n$ denote variables, $a \in \mathbb{R}^n$ denote coefficients, and $b \in \mathbb{R}$ denotes a constant value. Such expressions, are prevalent in any problem than involves linear constraints and/or objectives.
In InfiniteOpt, affine expressions can be defined directly using Julia's arithmetic operators (i.e., +, -, *, etc.) or using @expression. For example, let's define the expression $2y(t) + z - 3t$ noting that the following methods are equivalent:
julia> @infinite_parameter(model, t in [0, 10])
t
julia> @variable(model, y, Infinite(t))
y(t)
julia> @variable(model, z)
z
julia> expr = 2y + z - 3t
2 y(t) + z - 3 t
julia> expr = 2 * y + z - 3 * t
2 y(t) + z - 3 t
julia> expr = @expression(model, 2y + z - 3t)
2 y(t) + z - 3 t
julia> typeof(expr)
GenericAffExpr{Float64, GeneralVariableRef}Notice that coefficients to variables can simply be put alongside variables without having to use the * operator. Also, note that all of these expressions are stored in a container referred to as a GenericAffExpr which is a JuMP object for storing affine expressions.
Where possible, it is preferable to use @expression for defining expressions as it is much more efficient than explicitly using the standard operators.
GenericAffExpr objects contain 2 fields which are:
constant::CoefTypeThe constant value of the affine expression.terms::OrderDict{VarType, CoefType}A dictionary mapping variables to coefficients.
For example, let's see what these fields look like in the above example:
julia> expr.terms
OrderedCollections.OrderedDict{GeneralVariableRef, Float64} with 3 entries:
y(t) => 2.0
z => 1.0
t => -3.0
julia> expr.constant
0.0Notice that the ordered dictionary preserves the order in which the variables appear in the expression.
More information can be found in the documentation for affine expressions in JuMP.
Quadratic Expressions
A quadratic function pertains to a mathematical function of the form:
\[f_q(x) = a_1x_1^2 + a_2 x_1 x_2 + ... + a_m x_n^2 + f_a(x)\]
where $x \in \mathbb{R}^n$ are the variables, $f_a(x): \mathbb{R}^n \mapsto \mathbb{R}$ is an affine function, and $m = n(n+1)/2$ is the number of unique combinations of variables $x$. Like affine expressions, quadratic expressions can be defined via Julia's arithmetic operators or via @expression. For example, let's define $2y^2(t) - zy(t) + 42t - 3$ using the following equivalent methods:
julia> expr = 2y^2 - z * y + 42t - 3
2 y(t)² - z*y(t) + 42 t - 3
julia> expr = @expression(model, 2y^2 - z * y + 42t - 3)
2 y(t)² - z*y(t) + 42 t - 3
julia> typeof(expr)
GenericQuadExpr{Float64, GeneralVariableRef}Again, notice that coefficients need not employ *. Also, the object used to store the expression is a GenericQuadExpr which is a JuMP object used for storing quadratic expressions.
GenericQuadExpr object contains 2 data fields which are:
aff::GenericAffExpr{CoefType,VarType}An affine expressionterms::OrderedDict{UnorderedPair{VarType}, CoefType}A dictionary mapping quadratic variable pairs to coefficients.
Here the UnorderedPair type is unique to JuMP and contains the fields:
a::AbstractVariableRefOne variable in a quadratic pairb::AbstractVariableRefThe other variable in a quadratic pair.
Thus, this form can be used to store arbitrary quadratic expressions. For example, let's look at what these fields look like in the above example:
julia> expr.aff
42 t - 3
julia> typeof(expr.aff)
GenericAffExpr{Float64, GeneralVariableRef}
julia> expr.terms
OrderedCollections.OrderedDict{UnorderedPair{GeneralVariableRef}, Float64} with 2 entries:
UnorderedPair{GeneralVariableRef}(y(t), y(t)) => 2.0
UnorderedPair{GeneralVariableRef}(z, y(t)) => -1.0Notice again that the ordered dictionary preserves the order.
More information can be found in the documentation for quadratic expressions in JuMP.
Nonlinear Expressions
In this section, we walk you through the ins and out of working with general nonlinear (i.e., not affine or quadratic) expressions in InfiniteOpt.
Our previous InfiniteOpt specific nonlinear API as been removed in favor of JuMP's new and improved nonlinear interface. Thus, InfiniteOpt now strictly uses the same expression structures as JuMP.
Basic Usage
We can define nonlinear expressions in similar manner to how affine/quadratic expressions are made in JuMP. For instance, we can make an expression using normal Julia code outside a macro:
julia> @infinite_parameter(model, t ∈ [0, 1]); @variable(model, y, Infinite(t));
julia> expr = exp(y^2.3) * y - 42
(exp(y(t) ^ 2.3) * y(t)) - 42
julia> typeof(expr)
GenericNonlinearExpr{GeneralVariableRef}Thus, the nonlinear expression expr of type GenericNonlinearExpr is created and can be readily incorporated into other expressions, the objective, and/or constraints. For macro-based definition, we simply use the @expression, @objective, and @constraint macros as normal:
julia> @expression(model, expr, exp(y^2.3) * y - 42)
(exp(y(t) ^ 2.3) * y(t)) - 42
julia> @objective(model, Min, ∫(0.3^cos(y^2), t))
∫{t ∈ [0, 1]}[0.3 ^ cos(y(t)²)]
julia> @constraint(model, constr, y^y * sin(y) + sum(y^i for i in 3:4) == 3)
constr : (((y(t) ^ y(t)) * sin(y(t))) + (y(t) ^ 3) + (y(t) ^ 4)) - 3 = 0, ∀ t ∈ [0, 1]The legacy @NLexpression, @NLobjective, and @NLconstraint macros in JuMP are not supported by InfiniteOpt.
Natively, we support all the same nonlinear operators that JuMP does. See JuMP's documentation for more information.
We can interrogate which nonlinear operators our model currently supports by invoking all_nonlinear_operators. Moreover, we can add additional operators (see Adding Nonlinear Operators for more details).
Finally, we highlight that nonlinear expressions in InfiniteOpt support the same linear algebra operations as affine/quadratic expressions:
julia> @variable(model, v[1:2]); @variable(model, Q[1:2, 1:2]);
julia> @expression(model, v' * Q * v)
0 + ((Q[1,2]*v[1] + Q[2,2]*v[2]) * v[2]) + ((Q[1,1]*v[1] + Q[2,1]*v[2]) * v[1])Function Tracing
In similar manner to Symbolics.jl, we support function tracing. This means that we can create nonlinear modeling expression using Julia functions that satisfy certain criteria. For instance:
julia> myfunc(x) = sin(x^3) / tan(2^x);
julia> expr = myfunc(y)
sin(y(t) ^ 3) / tan(2 ^ y(t))However, there are certain limitations as to what internal code these functions can contain. The following CANNOT be used:
- loops (unless it only uses very simple operations)
- if-statements (see workaround below)
- unrecognized operators (if they cannot be traced).
If a particular function is not amendable for tracing, try adding it as a new nonlinear operator instead. See Adding Nonlinear Operators for details.
We can readily work around the if-statement limitation using op_ifelse which is a nonlinear operator version of Base.ifelse and follows the same syntax. For example, the function:
function mylogicfunc(x)
if x >= 0
return x^3
else
return 0
end
endis not amendable for function tracing, but we can rewrite it as:
julia> function mylogicfunc(x)
return op_ifelse(op_greater_than_or_equal_to(x, 0), x^3, 0)
end
mylogicfunc (generic function with 1 method)
julia> mylogicfunc(y)
ifelse(y(t) >= 0, y(t) ^ 3, 0)which is amendable for function tracing. Note that the basic logic operators (e.g., <=) have special nonlinear operator analogues when used outside of a macro. See JuMP's documentation for more details.
Linear Algebra
As described above in the Basic Usage Section, we support basic linear algebra operations with nonlinear expressions! This relies on our basic extensions of MutableArithmetics, but admittedly this implementation is not perfect in terms of efficiency.
Using linear algebra operations with nonlinear expression provides user convenience, but is less efficient than using sums. Thus, sum should be used instead when efficiency is critical.
julia> v' * Q * v # convenient linear algebra syntax
(+(0) + ((Q[1,1]*v[1] + Q[2,1]*v[2]) * v[1])) + ((Q[1,2]*v[1] + Q[2,2]*v[2]) * v[2])
julia> sum(v[i] * Q[i, j] * v[j] for i in 1:2, j in 1:2) # more efficient
((((v[1]*Q[1,1]) * v[1]) + ((v[2]*Q[2,1]) * v[1])) + ((v[1]*Q[1,2]) * v[2])) + ((v[2]*Q[2,2]) * v[2])We can also set vectorized constraints using the .==, .<=, and .>= operators:
julia> @variable(model, W[1:2, 1:2]);
julia> @constraint(model, W * Q * v .== 0)
2-element Vector{InfOptConstraintRef}:
((+(0) + ((W[1,1]*Q[1,1] + W[1,2]*Q[2,1]) * v[1])) + ((W[1,1]*Q[1,2] + W[1,2]*Q[2,2]) * v[2])) - 0 = 0
((+(0) + ((W[2,1]*Q[1,1] + W[2,2]*Q[2,1]) * v[1])) + ((W[2,1]*Q[1,2] + W[2,2]*Q[2,2]) * v[2])) - 0 = 0Adding Nonlinear Operators
In a similar spirit to JuMP and Symbolics, we can add nonlinear operators such that they can be directly incorporated into nonlinear expressions as atoms (they will not be traced). This is done via the @operator macro. We can register any operator that takes scalar arguments (which can accept inputs of type Real):
julia> h(a, b) = a * b^2; # an overly simple example operator
julia> @operator(model, op_h, 2, h);
julia> op_h(y, 42)
op_h(y(t), 42)Where possible it is preferred to use function tracing instead. This improves performance and can prevent unintentional errors. See Function Tracing for more details.
To highlight the difference between function tracing and operator definition consider the following example:
julia> f(a) = a^3;
julia> f(y) # user-function gets traced
y(t) ^ 3
julia> @operator(model, op_f, 1, f) # create nonlinear operator
NonlinearOperator(f, :op_f)
julia> op_f(y) # function is no longer traced
op_f(y(t))Thus, nonlinear operators are incorporated directly. This means that their gradients and hessians will need to determined as well (typically occurs behind the scenes via auto-differentiation with the selected optimizer model backend). However, again please note that in this case tracing is preferred since f can be traced.
Let's consider a more realistic example where the function is not amenable to tracing:
julia> function g(a)
v = 0
for i in 1:4
v *= v^a
if v >= 1
return v
end
end
return a
end;
julia> @operator(model, op_g, 1, g);
julia> op_g(y)
op_g(y(t))Notice this example is a little contrived still, highlighting that in most cases we can avoid adding operators. However, one exception to this trend, are functions from other packages that we might want to use. For example, perhaps we would like to use the eta function from SpecialFunctions.jl which is not natively supported:
julia> using SpecialFunctions
julia> @operator(model, op_eta, 1, eta)
NonlinearOperator(eta, :op_eta)
julia> op_eta(y)
op_eta(y(t))Now in some cases we might wish to specify the gradient and hessian of a univariate operator to avoid the need for auto-differentiation. We can do this, simply by adding them as additional arguments in @operator:
julia> my_squared(a) = a^2; gradient(a) = 2 * a; hessian(a) = 2;
julia> @operator(model, op_square, 1, my_squared, gradient, hessian);
julia> op_square(y)
op_square(y(t))Note the specification of the hessian is optional (it can separately be computed via auto-differentiation if need be).
For multivariate functions, we can specify the gradient following the same gradient function structure that JuMP uses:
julia> w(a, b) = a * b^2;
julia> function wg(v, a, b)
v[1] = b^2
v[2] = 2 * a * b
return
end;
julia> @operator(model, op_w, 2, w, wg)
NonlinearOperator(w, :op_w)
julia> op_w(42, y)
op_w(42, y(t))Note that the first argument of the gradient needs to accept an AbstractVector{Real} that is then filled in place.
We do not currently support vector inputs or vector valued functions directly, since typically JuMP optimizer model backends don't support them.
More Details
For more details, please consult JuMP's Documentation.